Projects
Research Projects
Safe Learning-Based Trajectory Planning for Mobile Robots

Trajectory planning is foundational for achieving many higher-level objectives in robotics. However, current solutions often fall short in providing safe and robust trajectory generation in dynamic and realistic human-interactive scenarios. This project aims to advance towards the goal of enabling safe, efficient, and socially-aware robot navigation by leveraging reinforcement learning, uncertainty management, and other advanced techniques.
Learning-Based Actuation of Magnetic Soft Robots [Archived]
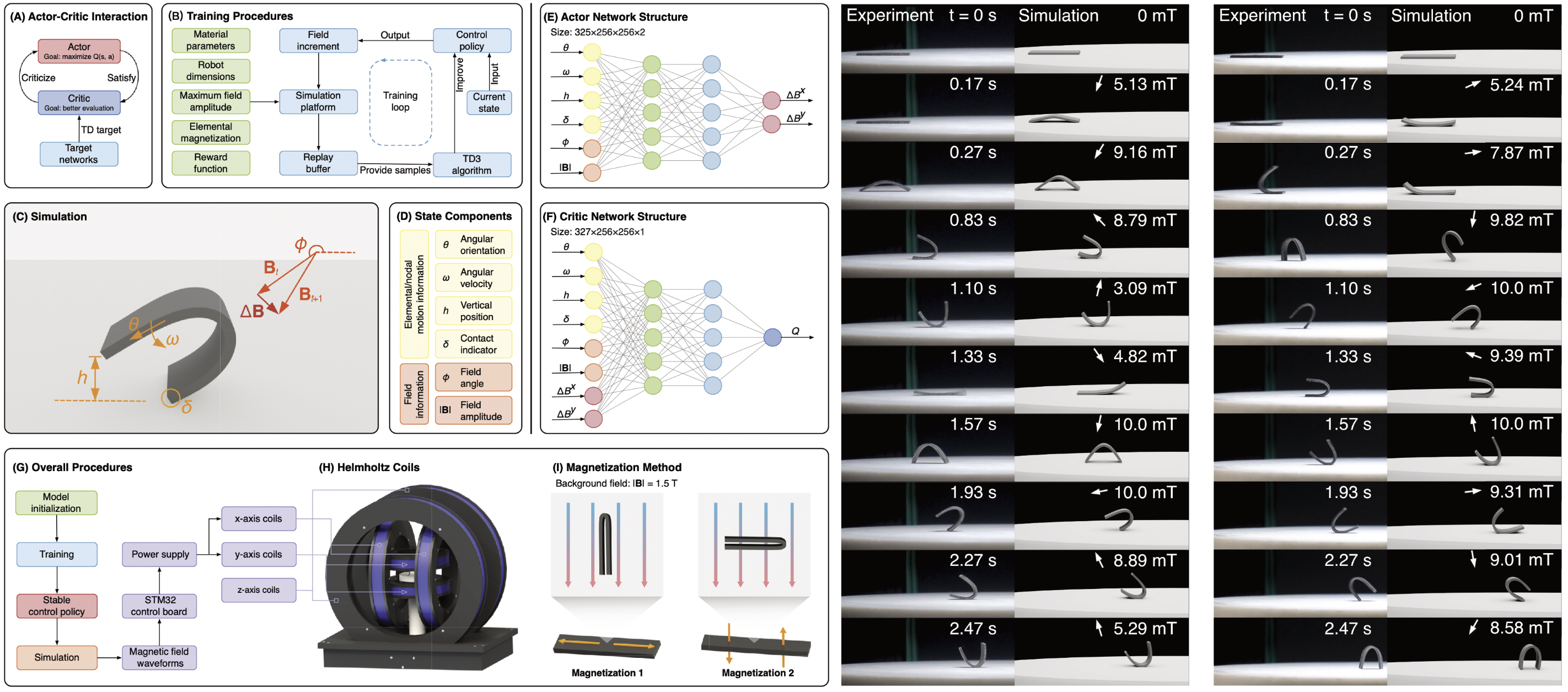
Researchers in the field of magnetic soft robotics have long relied on heuristics to design both the magnetic fields and the motion patterns of magnetic soft robots, which are often overly dependent on trial and error and can involve noticeable uncertainty. This work introduces the first approach in this field to generate actuation policies using reinforcement learning, demonstrating the adaptability of this method. The entire system includes simulation development, reinforcement learning deployment, and addressing the Sim2Real gap.